Personalized ADAS in CARLA
This project aims to personalize Advanced Driving-assistance Systems (ADAS) for autonomous vehicles using the self-driving car simulator CARLA. The two main focuses are on personalizing lane changing and personalizing Adaptive Cruise Control (ACC) that includes vehicle following and lane following.
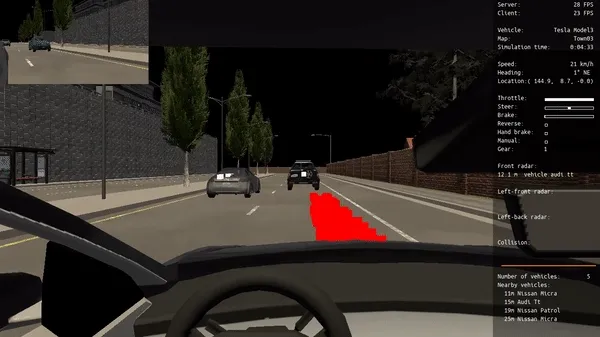
Hardware-In-Loop based simulation with torque-controlled steering motor and CARLA.
Learning Phase
The Learning Phase uses a Gaussian Mixture Model (GMM) for clustering user preferences into known presets that the ADAS can act on.
The vehicle starts in autopilot mode. Press p to toggle between manual control and autopilot.
In manual control mode:
- Press
lto start or end a learning recording session (collects driver behavior data). - Press
tto train the model on the collected data and save it locally.
After training, press Backspace to reset the scene, then enable autopilot to observe the personalized behavior.
It is advisable to personalize lane following in scene 0, clone vehicle following behavior in scene 1, and teach lane changing in scene 2.
Personalization
Sample data for 3 different drivers is stored in data/Driver_Data.
Lane Following
Personalized parameter: target_speed
Method: GMM
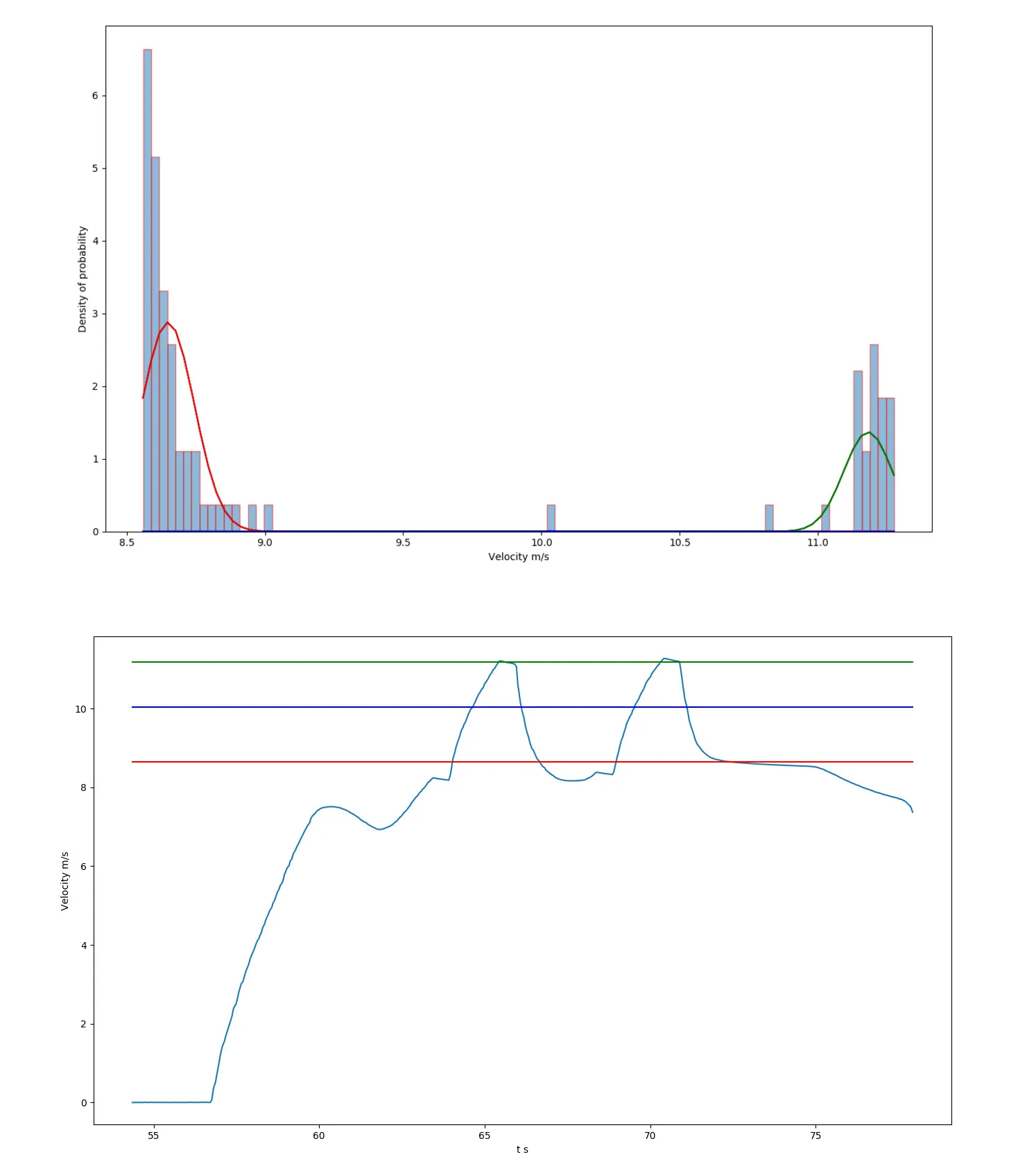
Driver 1 Set 1 — Target Speed Histogram Plot & V-t Plot
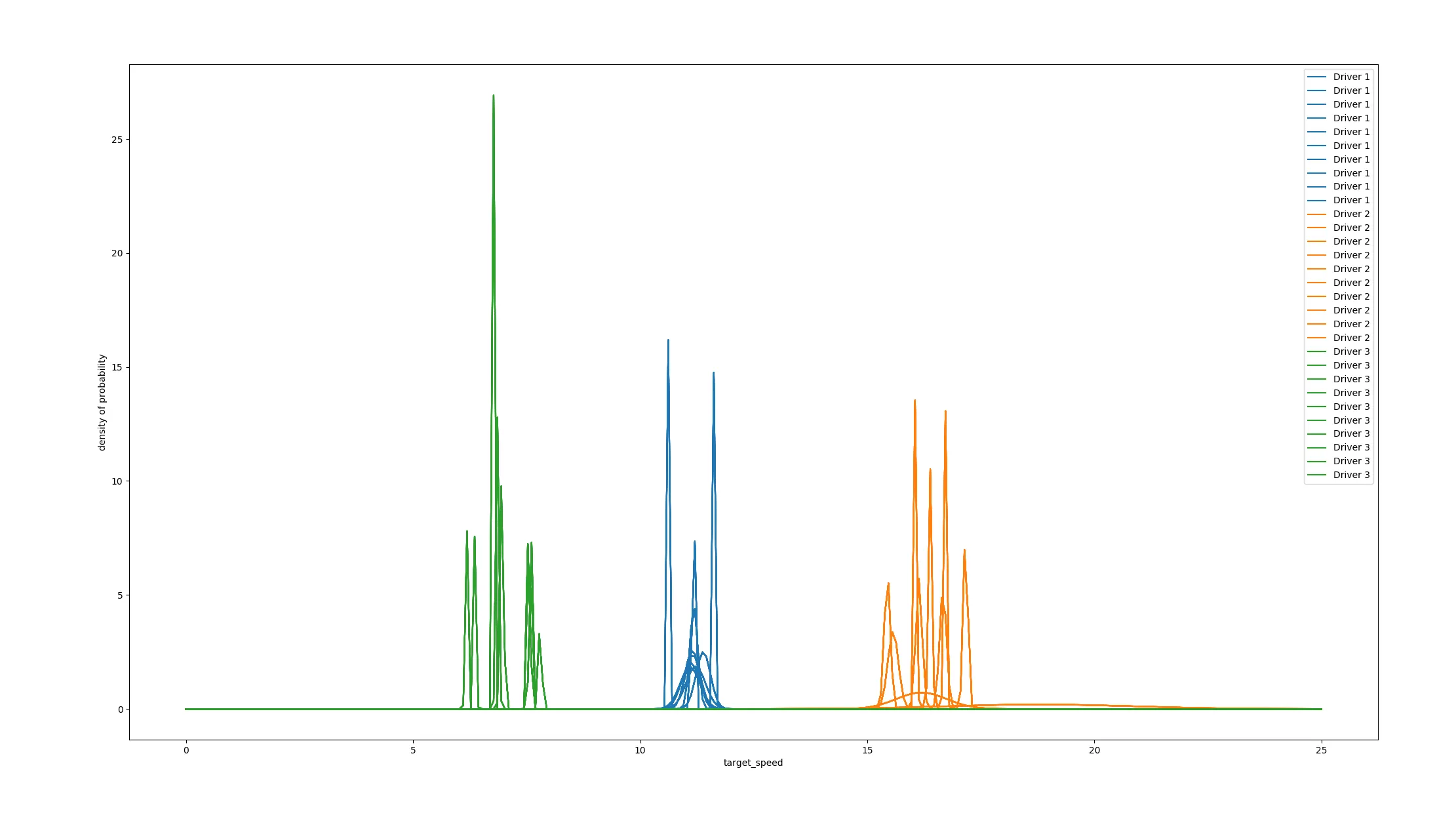
All sets of 3 drivers’ data
Vehicle Following
Personalized parameter: Time Headway (THW)
Method: GMM
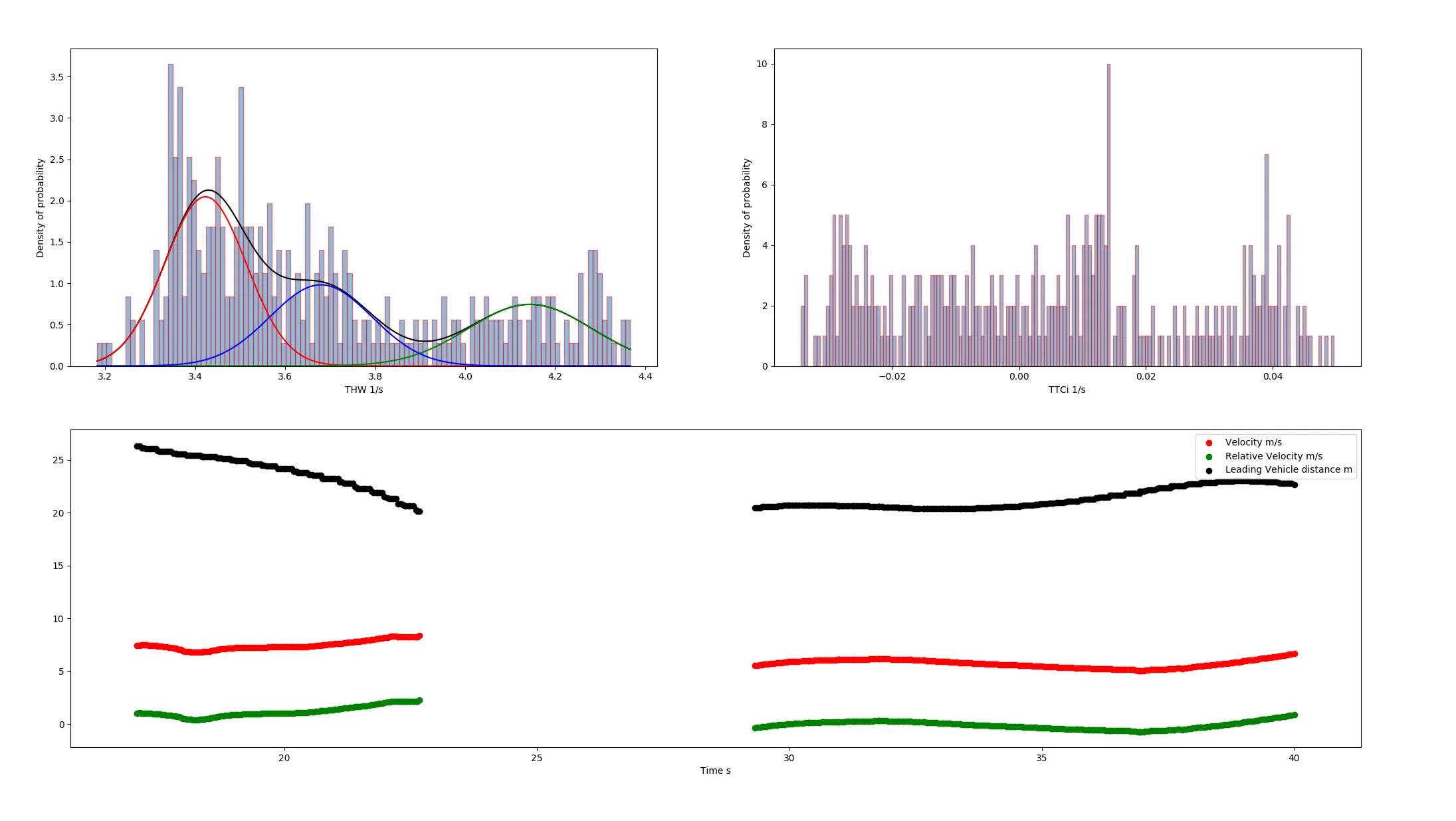
Driver 1 Set 1 — THW, TTCi
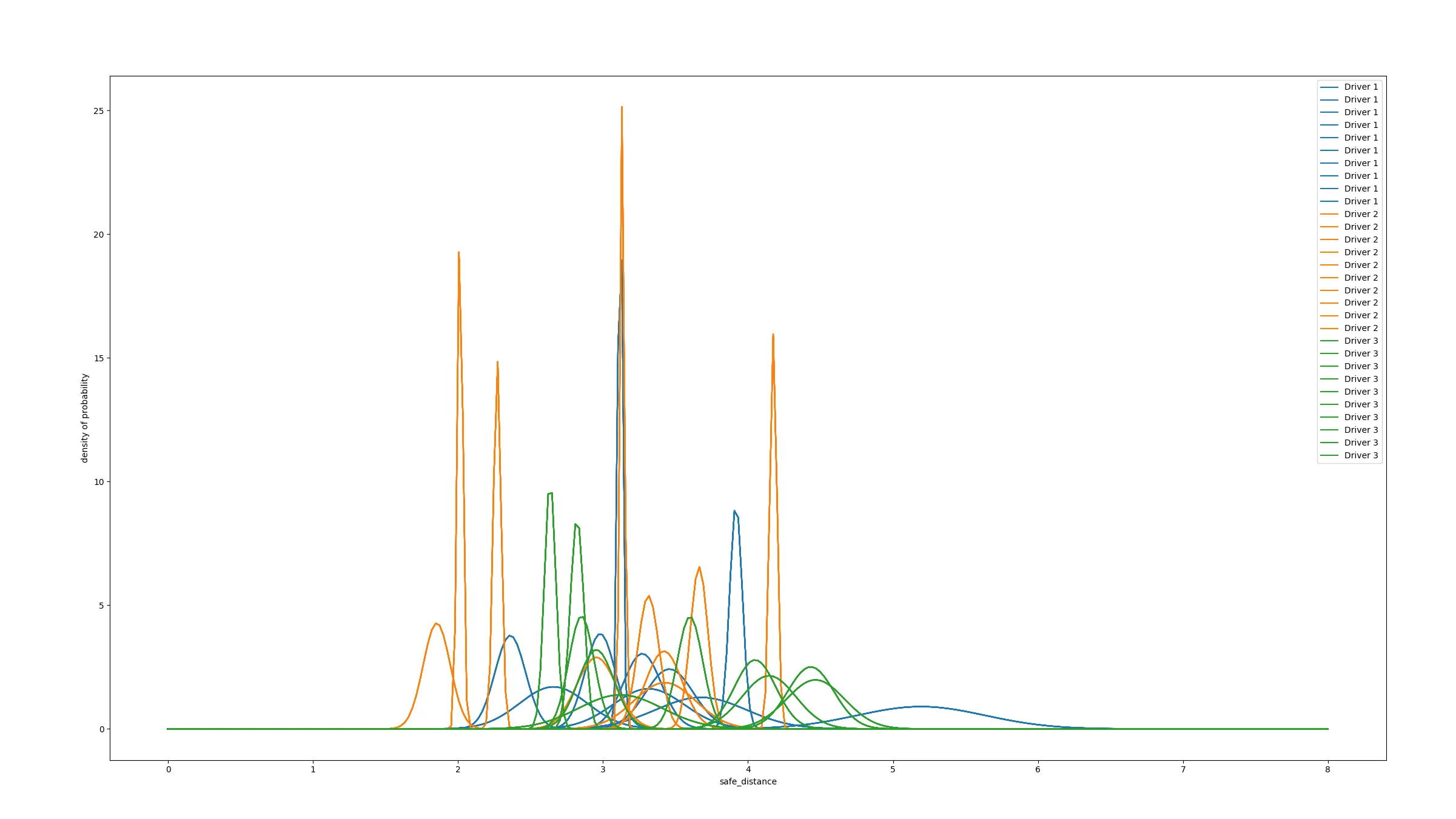
All sets of 3 drivers’ data
Lane Changing
Personalized parameters: Lateral Time, Longitudinal Velocity
Method: GMM + COS Trajectory
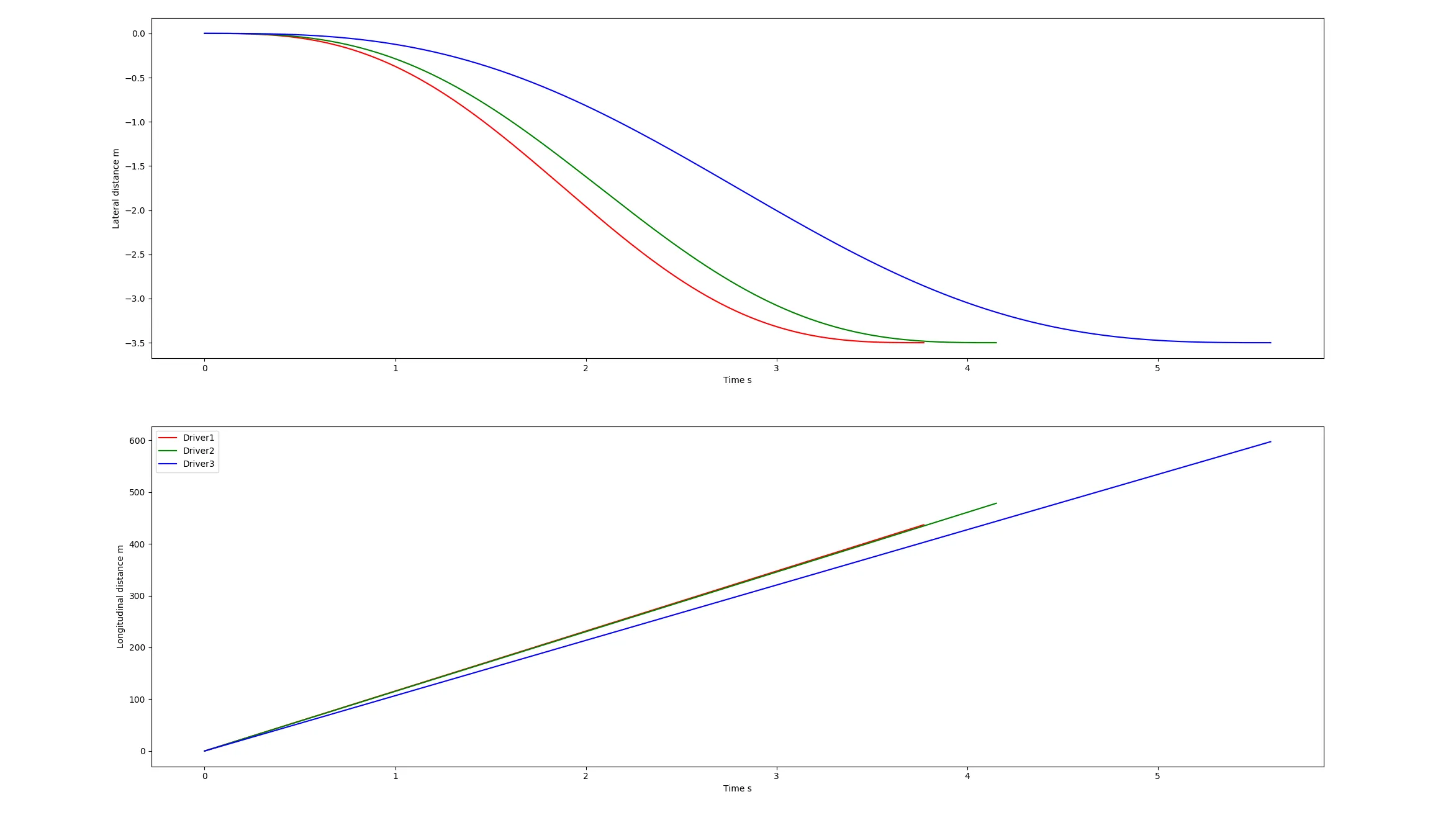
3 drivers’ trained models performing lane change in standard case [10m/s, -3.5m, 15m, -12m]